My research focuses on soft robots design and industrial robotic automation solution. This includes deep investigations into the generative design of soft end effectors, closed-loop systems of the robotic solution, and communication between devices to optimize working efficiency and throughput, etc. Currently at RoPlus, we are working on turning these robotics automation solutions affordable and accessible to address market demands. A robotic system that is safe to interact with yet strong enough to endure mistakes, which facilitates embedded intelligence on the edge.
I received my B.Eng. in Mechanical Engineering from National Taiwan University and my M.Eng. in Biomedical Engineering with a specialisation in design of soft robotic end-effector from the National University of Singapore. Associated with the Evolution and Innovation Lab (EI lab) led by Assoc. Prof. Raye Yeow, my work stemmed from the 3D printed soft linear actuator to robotics devops automation.
Chinese(Native)
English(Advanced)
Japanese(Intermediate)
Spainish(Elementary)
Korean(Beginner)
Python, C++, Matlab
Fusion 360/Solidworks
ROS/ROS2/Linux/Unix
Docker/DevOps
STM32Cube/PlatformIO
Data Analytics
TensorFlow/Kubernetes
HTML/CSS
Badminton
Cooking
Traveling
Mountain climbing
How selfish soever man may be supposed, there are evidently some principles in his nature, which interest him in the fortune of others, and render their happiness necessary to him, though he derives nothing from it, except the pleasure of seeing it.
Adam Smith The Theory of Moral Sentiments, Chapter 1
Here is where I list down my selected past and current projects for your reference, including attended conferences and exhibitions.
For full list of my publications, please request through the previous page or drop me an email.
Launching our latest finger actuator and gathering feedbacks from the leading soft robotics scientist around the world. Sharing my ideas and mission in RoPlus with Prof. Dario Floreano.
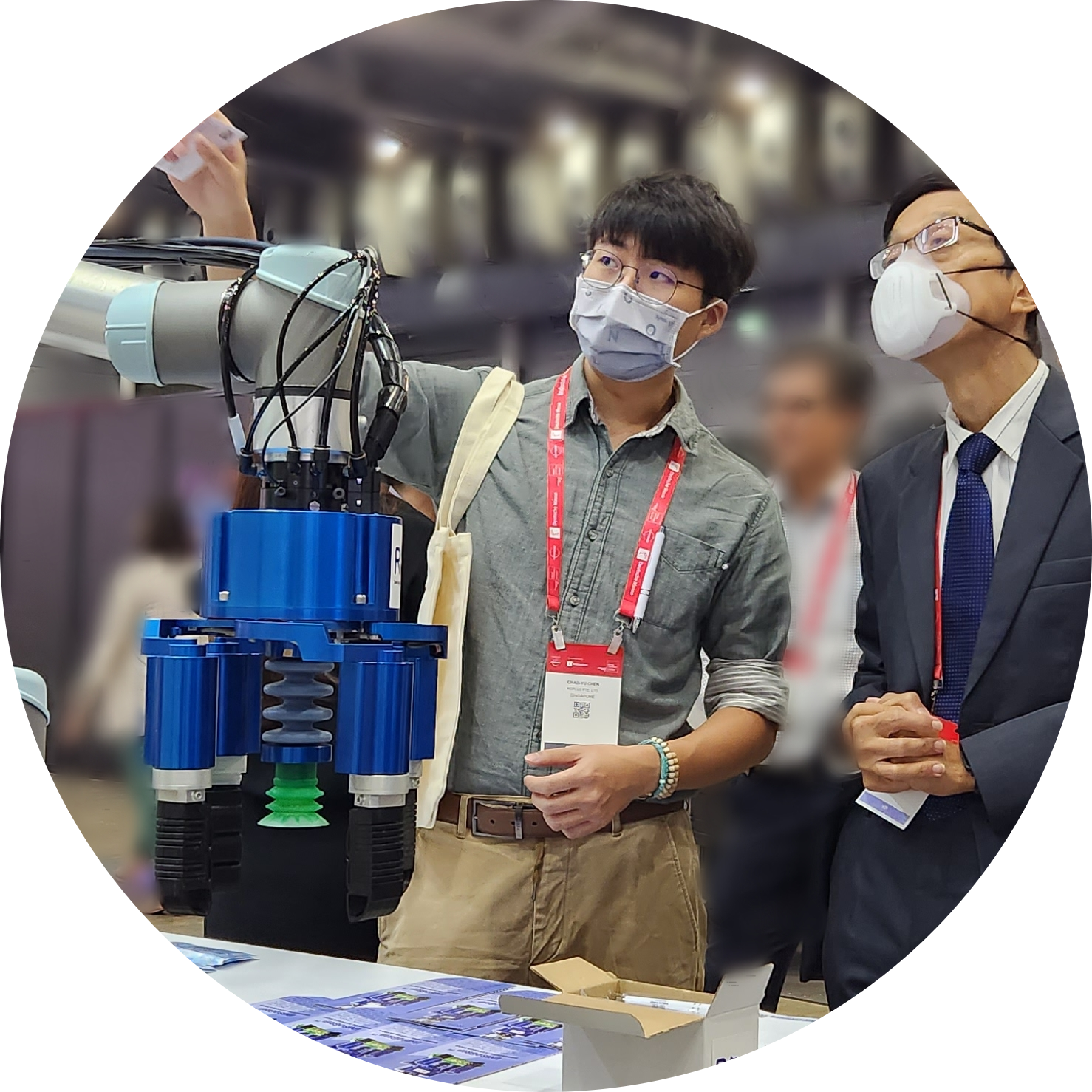
The potential of robotics gripper to possess human-like agility allows the increase of automation efficiency and tolerance towards chaotic scenario. Elaborating on how all-in-one gripper could benefit the industry with Prof. Quek.
DOI: 10.1109/RoboSoft51838.2021.9479190
The design of the Soft Extension Actuator(SEA) aims for a high extension ratio performance and modular in different configuration. This research is published in the proceedings of Robosoft 2021.
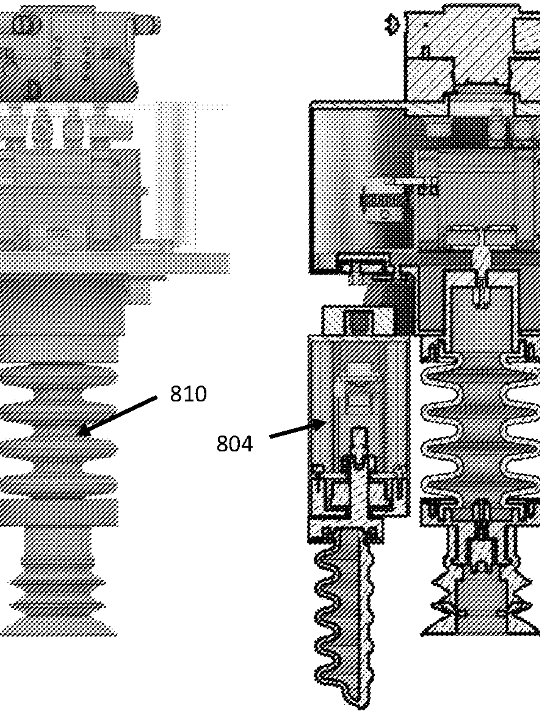
WIPO Publication no.:WO2022098300
Soft grippers inherently persist the nature of compliance to a certain degree. This work aims to provide a more univseral solution in pick-and-place application for SKUs by fusing different gripping methods and gaining reconfigurability.
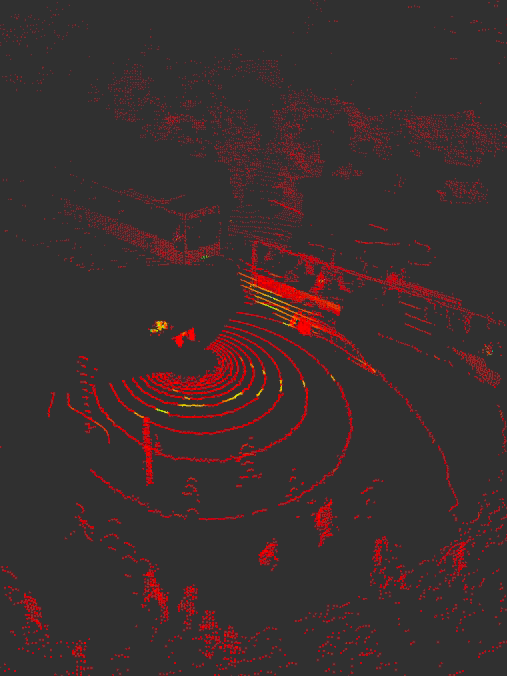
Dataset reconstruction with pcl library and rviz visualization. Parsed and annotated via Supervisely.
Parsing reference: NUScenes Dataset

An derivative study stememd from the GSG with integrated mechanical sensing. Fully pneumatically driven snap through structure and customized compliant structure.
DOI: 10.1109/LRA.2022.3187819
Thank you for visiting my website! If you have similar passion over robotics and devops automation, feel free to reach out to me.
For business proposal for the startup, please send it through the RoPlus email below. I am also looking forward to more interesting collaborations.